Advertorial
Za dverami Dorsis nájdete nielen bezpečie a pokoj, ale aj eleganciu a nadčasový design
Integrované dverové systémy predstavujú riešenie, ktoré spája vysoké technické nároky s architektonickou...
Myotis stôl - "menej je viac"
Dá sa šetriť bez ujmy na dizajne?
Imperiálna kvalita zvukov a emócií z prírody. Spoznajte koncertnú sieň vo Weikersheime v Nemecku
Architekti zo štúdia HENN stavili na prirodzenosť dreva, precízne navrhnutú akustiku a premyslený...
Dizajn bez kompromisov: detail, ktorý mení spôsob otvárania dverí
Tiché a bezkontaktné dovieranie dverí dopĺňajú ergonomické madlá v rôznych dizajnových a funkčných prevedeniach, vrátane...
Rodinný dom Vinje, Slovinsko
Bývanie na južných svahoch alpského predhoria.
Tvárnice Silka pomohli výrazne urýchliť hrubú stavbu bytového domu v centre Bratislavy
Kombinácia Silky so železobetónovým skeletom sa v tomto projekte ukázala ako ideálne riešenie pre...
Tradičná slovenská architektúra sa v Lietave snúbi s vysokými požiadavkami na súčasné bývanie
Projekt „IBV Lietava – 4 domy pri lese“ ponúka premyslené riešenia s dôrazom na tradíciu a...
NEXUM - novinka v portfóliu industriálnych priečok Dorsis Digero
Tento inovatívny systém presklených priečok s paralelne posuvnými dverami a tromi prepojenými krídlami prináša elegantné...
Kľučka ERA z dielne M&T ako odraz súčasnej éry
Kľučka od Barbory Škorpilovej je odrazom súčasnej estetiky a technológií. Inšpirovaná tvarom ohnutého papiera, spája jemné línie s moderným...
Nová kolekcia Linfa: opticky ľahká a mimoriadne odolná
Spoločnosť mmcité predstaví na výsteve v Miláne novú kolekciu Linfa od AG&P greenscape a Cattaneo design.
Rodinný dom Villa Mia – vzhľad a funkcie v harmóni
Realizácia s použitím riešení od spoločnosti JAP FUTURE, ktorá dodala prémiový interiérový sortiment dotiahnutý do všetkých detailov
Paranorma - levitujúce okná bez limitov
Česká firma Janošík balansuje na hranici možného.
Rastúci trend coworkingových kancelárií v Českej a Slovenskej republike
Sklenené priečky od spoločnosti Milt ako kľúčový prvok moderného dizajnu
Kľučka ako ikona
ICONIC: Kľučka, ktorá spája históriu s modernou eleganciou
Okná od spoločnosti Rehau boli opäť ocenené za inovatívnu udržateľnosť
REHAU Window Solutions získalo ocenenie German Design Award 2025 za vynikajúce riešenie okien ARTEVO TERRA.
Kinetická a responzívna architektúra – pohyb telesa v priestore



Doc. Ing. Ľudovít Kolláth, PhD.
Strojnícka fakulta STU v Bratislave, e-mail:ludovit.kollath@stuba.sk
Mgr. art. Júlia Kolláthová, ArtD.
Vysoká škola výtvarných umení v Bratislave, e-mail: kollathova@vsvu.sk
Úvod
Donedávna sme si pod spojením architektúry a pohybu predstavovali pohyb užívateľa v rámci alebo okolo architektonického priestoru. S rozvojom počítačových technológií v 90. rokoch sa otvorili nové technologické možnosti, vznikli animované formy, generatívna a parametrická architektúra. Pojem animovanej architektúry sa viaže k menu Grega Lynna, ktorý chápal architektúru ako objem, na ktorý pôsobia rôzne sily, ktoré ho formujú. Pomocou technológií vypožičaných napr. z automobilového priemyslu dokázal tento proces znázorniť, zanimovať. Výsledkom bola forma, ktorá niesla na sebe stopy pôsobiacich síl. Aj parametrická architektúra dokáže pomocou počítačových technológií znázorniť premenlivosť formy v závislosti od zadaných parametrov.
Pod architektonickým priestorom si väčšinou predstavujeme priestor pre pohybujúceho sa
človeka alebo pre viacerých ľudí. S rôznymi formami pohybu sa stretávame v prírode, samotná príroda okolo nás tvorí cyklicky sa opakujúci systém so striedaním sa denných častí a ročných období. Prečo by na to architektúra nemala vedieť reagovať a prispôsobovať sa týmto zmenám? Alebo zmeneným potrebám užívateľov? Samozrejme takisto, ako ľudské telo potrebuje kosti, kĺby, svaly a nervy na jednoduchý pohyb ruky, takisto je s kinetikou neodlučiteľne prepojená technologická časť budov. Možno práve táto mechanická časť by mohla predstavovať riešenie na problém presadenia komplexných digitálnych návrhov do reálneho fyzického sveta. Pri komplexných neeuklidovských generovaných tvaroch dochádza totiž často ku kolízií počítačových možností a stavebnej reality, komerčných staviteľských postupov. Mnohí architekti sa nechali inšpirovať dopravnými prostriedkami, autami, lietadlami, vlakmi, loďami. Le Corbusier považoval dom dokonca za „stroj na bývanie“. Mechanické časti ako ozubené kolieska, koľajnice, pohyblivé spoje, pánty a pod. dokážu zabezpečiť pohyblivosť v rámci architektonických štruktúr. Škála riešení môže byť veľmi rôznorodá, čo sa týka mierky a komplexnosti. Premiestniteľný a pohyblivý môže byť celok alebo väčšia či menšia časť celku. Niekedy sa kinetické prvky objavujú v rámci interiéru ako posuvné steny, inokedy na fasáde ako tieniace prvky.
Kinetická architektúra rieši architektonické diela s pohybmi jednotlivých ich častí. Je veľmi úzko spojená s responzívnou architektúrou. Totiž, aby mohlo niečo reagovať na podnety prostredia, sú k tomu potrebné rôzne formy pohybu [5].
Neustále prenikanie IKT (informačné a komunikačné technológie), riadiacej techniky nám otvára nové a nové možnosti automatického riadenia týchto pohybov. Vyžaduje si to však sofistikovanejší prístup k riešeniu problému. Už nám veľmi často nestačí napr. riadiť a vymedziť rozsahy pohybov pomocou napr. koncových spínačov. Využíva sa automatické riadenie so spätnou väzbou, napr. polohovou (obr. 1) [1].

Pri technickej realizácii lineárneho alebo rotačného pohybu telesa sa objavujú otázky presnosti a opakovanej presnosti polohovania telesa. Základný problém je v tom, že kinematické štruktúry (mechanizmy, kinematické dvojice, prevody...) nikdy nie sú dokonale presné. Strojárske súčiastky sa vyrábajú s predpísanou toleranciou rozmerov a v prevodoch musí byť vôľa – aj keď minimálna. Tieto „poruchy“ sa eliminujú pomocou snímačov (polohy) v spätnej väzbe riadenia.
Pohyb telesa v priestore
Pohyb telesa sa určuje vzhľadom na iné teleso, resp. vzhľadom na súradnicový systém (obr. 2), ktorý je definovaný na druhom (vzťažnom) telese. Na voľbu súradnicového systému a umiestnenie jeho počiatku v podstate nie sú žiadne pravidlá. Prichádzajú do úvahy napr. kartézske, sférické, cylindrické súradnicové systémy. Najčastejšie sa však volí pravouhlý pravotočivý – kartézsky súr. systém (obr. 3) [2, 3]. Ak sa teleso pohybuje, menia sa jeho súradnice.


Teleso v tomto súradnicovom systéme môže vykonať priamočiare pohyby (translačné) okolo osí X, Y, Z a rotačné pohyby (A, B, C) okolo týchto osí.
Hovoríme tomu, že teleso v priestore má 6 stupňov voľností.
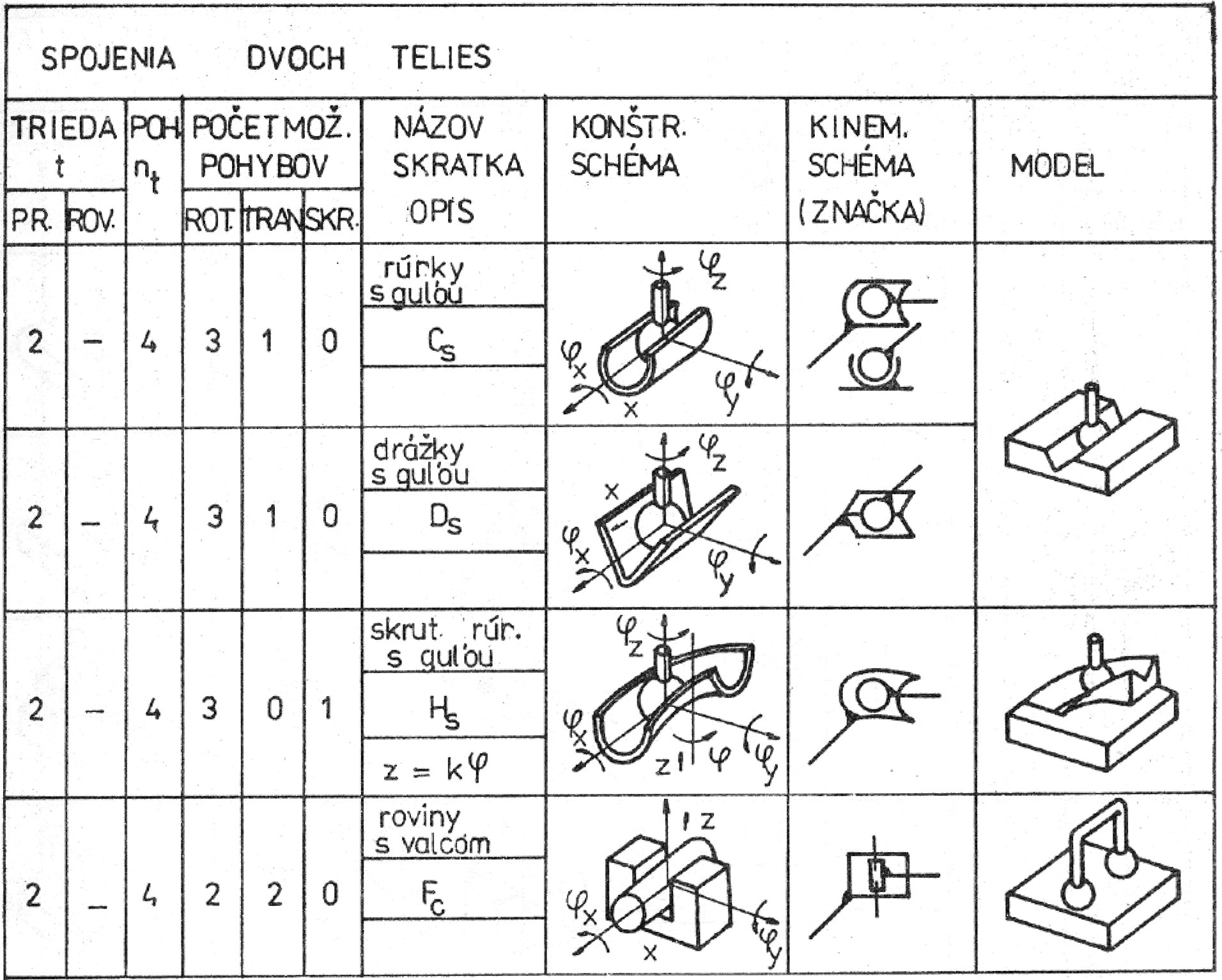
Postupným odoberaním týchto stupňov voľností dosiahneme, že teleso bude vykonávať len také pohyby, ktoré sú nutné k riešeniu konštrukcie kinetickej architektúry. Možnosti pohybu telesa závisia od spojenia (väzba) s druhým telesom, t. j. teleso musí byť prispôsobené na spojenie s druhým telesom. Toto prispôsobenie sa nazýva voľná poldvojica. Kinematická dvojica je potom vytvorená spojením (pohyblivou alebo nepohyblivou väzbou) dvoch voľných poldvojíc. Kinematické dvojice sa delia do tried. Trieda kinematickej dvojice je daná počtom stupňov voľnosti odobraných kinematickými väzbami. V tab. 1 až 4 sú schémy označenia vybraných dvojíc [4].



Záver
V kinetickej architektúre sa realizujú lineárne a rotačné pohyby, ktoré sa najčastejšie spájajú sériovo (sériová kinematická štruktúra), obr. 4.

Ak sa však vzdáme hlboko zakoreneného karteziánskeho súradnicového systému, môžeme si zostaviť aj paralelnú a hybridnú kinematickú štruktúru. Musíme však počítať aj s vyššími nárokmi na riadenie systému.
Poďakovanie
Tento príspevok vznikol vďaka finančnej podpore MŠVVaŠ projektu KEGA 003VŠVU-4/2020 Zvýšenie úrovne edukačného procesu v oblasti kinetickej architektúry.
Literatúra
[1] Velíšek, K., Košťál, P.: Mechanizácia a automatizácia, Vydavateľstvo STU v Bratislave, 187 s. 2006, ISBN 978-80-227-2753-2
[2] Buur, J.: A Theoretical Approach to Mechatronics Design, Institute for Engineering Design, TU of Denmark, Lyngby, 1990, 126 s.
[3]. GOUBEJ. M, ŠVEJDA. M, SCHLEGEL M. 2012. Úvod do mechatroniky, robotiky a systémů řízení pohybu. [online]. [cit. 2021-05- 25]. Dostupné z:
http://home.zcu.cz/~msvejda/URM/materialy/Uvod%20do%20mechatroniky.pdf
[4] KOLÍBAL, Zdeněk a Radek KNOFLÍČEK. Morfologická analýza stavby průmyslových
robotů. Košice: Vienala, 2000, 178 s.: il. ISBN 80-88922-27-5.
[5] Schumacher, M., Schaeffer, O., Vogt, M. M.: Move, Architekture in Motion – Dynamic Components and Elements, Birkhäuser Verlag AG, Basel 2010, Printed in Germany, ISBN 978-3-7643-9986-3
Súvisiace články

Videoherný priestor: diplomová práca ocenená za najpozoruhodnejšie vizionárske kvality návrhu v aktuálnom ročníku Ceny profesora Jozefa Lacka
Záverečná práca absolventa Katedry architektonickej tvorby VŠVU z výberu poroty celoštátnej súťaže o najlepšiu diplomovú prácu absolventov architektonických škôl.Načítavam diskusiu...